- Oktató: Badankó Péter
- Oktató: Dr. Erdélyiné Dr. Baradács Eszter Mónika
- Oktató: Egri Sándor
- Oktató: Tomán János
- Oktató: Tóth László Zoltán
- Oktató: Ujvári Balázs
- Oktató: Badankó Péter
- Oktató: Egri Sándor
- Oktató: Iszály Zsófia
- Oktató: Márián István Gábor
- Oktató: Tomán János
- Oktató: Tóth László Zoltán
- Oktató: Ujvári Balázs
- Oktató: Cserháti Csaba
- Oktató: Szabó István
Leírás:
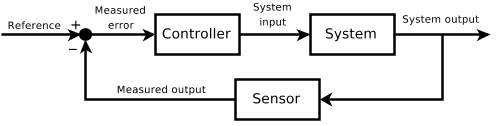
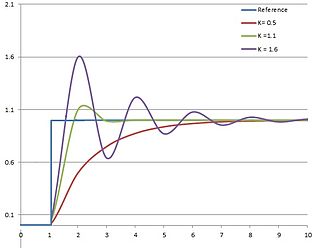
Az irányítás fogalma, irányítási struktúrák, az önműködő szabályozás felépítése, irányítástechnikai célok, irányítási stratégiák, a zárt és nyílt rendszer kialakítás főbb jellemzői. Lineáris rendszerek fogalma, lineáris rendszerek leírási módszerei az idő- és a frekvenciatartományban, funkcionális elemek jellemzői. Jelátvitel az irányítási rendszerben. A szabályozásokkal szemben támasztott követelmények. Folyamatos jelű lineáris szabályozási rendszerek Állapotváltozós, szabályozási tagok kapcsolási módjai. Stabilitásvizsgálat. A szabályozási kör statikus viselkedése, alapjel-követési és zavar-elhárítási tulajdonságai. Nyílt hurkú és a visszacsatolt rendszerek tipikus építőelemei, eredő jellemzők meghatározása, eszközei és módszerei, nemlineáris irányító rendszerek. Minőségi jellemzők fogalma, meghatározása stabilitás, stabilitási kritériumok, a minőségi jellemzők beállítása. A minőségi jellemzők fogalma, meghatározása, beállítása, a jelformálás elve és gyakorlata, jelformálási módszerek, a PI és a PD jelformálás funkciója, PID jelformálás, analóg és digitális PID szabályozók.
Oktatási segédeszközök:
- Oktató: Cserháti Csaba
- Oktató: Szabó István
A kurzus gyakorlati bevezetést nyújt az automatikus optikai vizsgálati módszerekbe a Labview grafikus programozási nyelv segítségével. Digitális képek begyűjtése. Képfeldolgozás; aritmetikai operációk ,világosságkód transzformációk, konvolúciók, korrelációk, szűrők. Fourier-transzformáció, szűrés a Fourier-térben. Képfeldolgozás morfológiai alapon, szegmentálás.
- Oktató: Tomán János
Az önálló labor 1 célkitűzése az önálló és csoportos feladatmegoldásra való felkészítés. A félév során választott technikai probléma a Lego NXT robotépítő készlet lehetőségeinek feltárása, és alkalmazás egy szabadon választott területen.
- Oktató: Cserháti Csaba
- Oktató: Cserháti Csaba